 Bill Wright,
probably not long after joining Chrysler in 1953.
Bill Wright,
probably not long after joining Chrysler in 1953.
Bill Wright,
probably not long after joining Chrysler in 1953.
Bill Wright,
probably not long after joining Chrysler in 1953.
Born in Memphis, Tennessee on November 22, 1927, William Paul Wright grew up in Lauderdale County, Alabama. From preschool age, Bill helped with all the chores on his fathers dairy farms. He attended Margaret Darby's kindergarten, and the Kilby Training School.
As a teenager, Bill bought a tractor and earned money plowing the fields of local farmers who were serving in the war. He attended Central High School, drove the school bus and built his first hot rod.
In 1946, Bill was drafted into the Army and chosen for training in Cooper Hill, Colorado as a ski trooper. This instilled in him a lifelong love for snow skiing, one he would share with his friends and family for decades.
After his discharge, Bill attended the Alabama Polytechnic Institute at Auburn, Alabama, where in 1951 he earned a Bachelor of Science Degree in Mechanical Engineering. He was then accepted at the prestigious Chrysler School of Engineering in Detroit, Michigan in 1953, earning a Master of Automotive Engineering Degree there in 1955. After graduation, Bill assumed technical supervisory responsibility, becoming an integral part of Chryslers engine research and development, to include work on early Hemi and gas turbine car engines. He spent weekends racing on Woodward Avenue or skiing with friends in Ontario. There Bill also developed a love for stock car racing.
In 1956, Chrysler transferred him to its new Missile Division in Huntsville, Alabama, where for two years he worked on the Redstone and Jupiter programs. There, Bill served as a technical staff assistant to the Huntsville Plant Manager, providing customer liaison and organization assistance. He was privileged to be an integral part of the birth of Americas space program. Dr. Wernher von Braun was among the many men and women he worked with during that time. There he also met the woman that would become his wife, Mildred Anne Speegle.
From late 1957 to 1958, Bill was supervisor of a mechanical design group which included responsibility for liquid rocket booster propellant systems, pneumatic and hydraulic systems, environmental control and integration hardware.
From 1958 to 1962, he managed an engineering department and supervised design, evaluation and analysis projects on the Jupiter and Saturn Programs in the areas of rocket propulsion and associated system design, flight evaluation and simulation, heat transfer and special systems analysis studies.
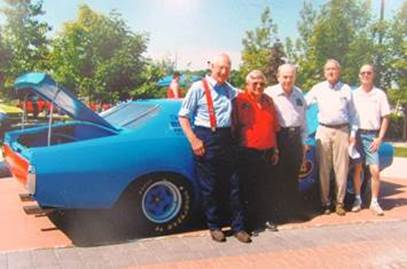 In 2001
at the Walter P. Chrysler Museum Car Show.(L-R) Larry Rathgeb, Milt Wood, George Wallace, Bill Wright, Greg Kwiatkowski.
Greg now owns all of Bills Chrysler documents, including those seen on this website.
In 2001
at the Walter P. Chrysler Museum Car Show.(L-R) Larry Rathgeb, Milt Wood, George Wallace, Bill Wright, Greg Kwiatkowski.
Greg now owns all of Bills Chrysler documents, including those seen on this website.
Later in 1962, Bill transferred to the Systems Static Test Branch as manager of the Saturn Vehicle Engineering Test Section which had the responsibility of captive testing of the S-1 booster.
From late 1963 into 1965, he was a member of the branch managers staff in charge of advanced engineering studies applicable to the Saturn Program and served as a special consultant for all test activities.
From 1965 to 1968, Bill was the manager of the Structures and Mechanics Department Advanced Studies Office. He was directly in charge of many advanced studies within the department.
By 1969, Chryslers rocket program was winding down, and Bill used the resources available in his testing lab to help develop Dodges latest entry into NASCAR, the legendary Dodge Charger Daytona. This was the first stock car to officially exceed 200 mph on a closed course, and it was among his proudest achievements. After leaving Chrysler in 1972, Bill went into the familys antique business, and began selling oriental rugs. He enjoyed meeting people from all over the region through his business.
William Paul Wright, age 87, passed away in Florence, Alabama on Thursday, April 16, 2015. Bill left behind his wife, Mildred Anne Speegle Wright; his two sons, Paul Howard Wright and William Neal Wright; and four grandchildren.