
Page 4 - Combined_41_OCR
P. 4
VIBRATION TESTING
Vibration is either the obvious cause or the prime Visualize a cork bobbing and drifting
symptom of problems in many different industrial on a pond; this is an example of
whole-body motion. If the cork also
situations. Solutions must be found. Increasingly, were bent by the waves, as the hull
engineers are required to measure and analyze RY of a ship might be, this deformation
vibration, to find engineered solutions, and to show would exemplify relative motion of
and document improvement. This article, the first the parts. Both types of motion are
of a three-part series, explores the different types forms of vibration that must be con
sidered in engineering designs. Prin
of instruments available for measuring vibrations. ciples of whole-body motion can be
Subsequent articles will discuss the gathering and THEO illustrated by an idealized spring
analysis of data, and solution to vibration problems. mass damped system.
Displacement and Velocity Sensors
If a structure is steadily vibrating with a large
amplitude, its approximate amplitude can be meas N
ured by holding a scale alongside it. But for small < > >
displacements—say a double amplitude of only 200
/tin. produced by a 10-g acceleration at 1000 Hz— TIO
such simple methods are entirely inadequate. ///
More sophisticated nonelectrical methods, such
as optically magnified scales, offer certain advan
tages; primarily, they magnify the amplitude so A /////////////^
that it can be seen by the naked eye. Electrical
sensors, however, are generally required to meas R
ure the tiny, high-frequency displacements that
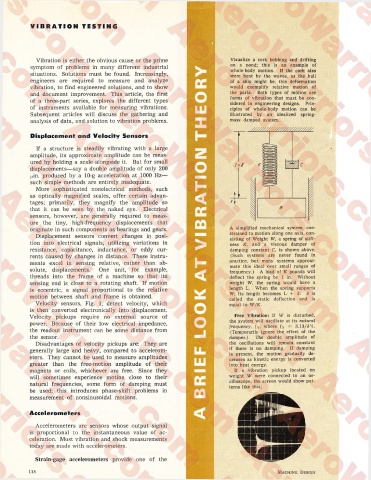
originate in such components as bearings and gears. IB A simplified mechanical system, con
Displacement sensors convert changes in posi strained to motion along one axis, con
sisting of Weight W, a spring of stiff
tion into electrical signals, utilizing variations in V ness K, and a viscous damper of
resistance, capacitance, inductance, or eddy cur damping constant C, is shown above.
rents caused by changes in distance. These instru (Such systems are never found in
ments excel in sensing relative, rather than ab practice, but many systems approxi
mate this ideal over small ranges of
solute, displacements. One unit, for example, AT frequency.) A load of K pounds will
threads into the frame of a machine so that its deflect the spring by 1 in. Without
sensing end is close to a rotating shaft. If motion weight W, the spring would have a
is eccentric, a signal proportional to the relative length L. When the spring supports
W, its length becomes L + 8. 8 is
motion between shaft and frame is obtained. called the static deflection and is
Velocity sensors, Fig. 1, detect velocity, which equal to W/K.
is then converted electronically into displacement. LOOK
Velocity pickups require no external source of Free Vibration: If W is disturbed,
power. Because of their low electrical impedance, the system will oscillate at its natural
frequency, fy, where fy = 3.13/8%.
the readout instrument can be some distance from (Temporarily ignore the effect of the
the sensor. damper.) The double amplitude of
Disadvantages of velocity pickups are: They are the oscillations will remain constant
generally large and heavy, compared to accelerom if there is no damping. If damping
is present, the motion gradually de
eters. They cannot be used to measure amplitudes creases as kinetic energy is converted
greater than the free-motion amplitude of their into heat energy.
magnets or coils, whichever are free. Since they BRIEF If a vibration pickup located on
will sometimes experience motion close to their weight W were connected to an os
cilloscope, the screen would show pat
natural frequencies, some form of damping must terns like this;
be used; this introduces phase-shift problems in
measurement of nonsinusoidal motions.
A
Accelerometers
Accelerometers are sensors whose output signal
is proportional to the instantaneous value of ac
celeration. Most vibration and shock measurements
today are made with accelerometers.
Strain-gage accelerometers provide one of the
118 Machine Design